Le secteur des transports est entré dans une phase de transformation profonde dans laquelle de nouvelles solutions de mobilité s’imposent. Parmi celles-ci, les véhicules autonomes apparaissent comme incontournables.
Selon le Boston Consulting Group, d’ici 2035, 12 millions de véhicules entièrement autonomes et 18 millions de véhicules partiellement autonomes pourraient être vendus par année à l’échelle mondiale. En outre, les véhicules équipés de systèmes autonomes devraient représenter 25 % du marché des véhicules neufs.
Les véhicules autonomes, aussi appelés véhicules automatisés, sont en mesure de prendre des décisions (comme freiner, dépasser, se garer, tourner à gauche ou à droite, etc.) à la place d’un conducteur, en fonction des informations qu’ils captent, et ce, en toute sécurité. Ils s’appuient sur plusieurs technologies, dont certaines sont déjà utilisées pour le développement des véhicules connectés. Ces derniers utilisent des technologies sans fil pour fournir aux conducteurs des informations nécessaires à leurs déplacements. Ils peuvent communiquer de manière bidirectionnelle avec les autres véhicules (« véhicule à véhicule » ou V2V) et avec l’infrastructure routière (« véhicule à infrastructure » ou V2I), l’objectif étant d’optimiser la sécurité, d’améliorer la mobilité et même de réduire les impacts environnementaux. Il est toutefois important de distinguer ces deux types de véhicules. Un véhicule peut être connecté sans être autonome, tandis qu’un véhicule autonome doit absolument être connecté.
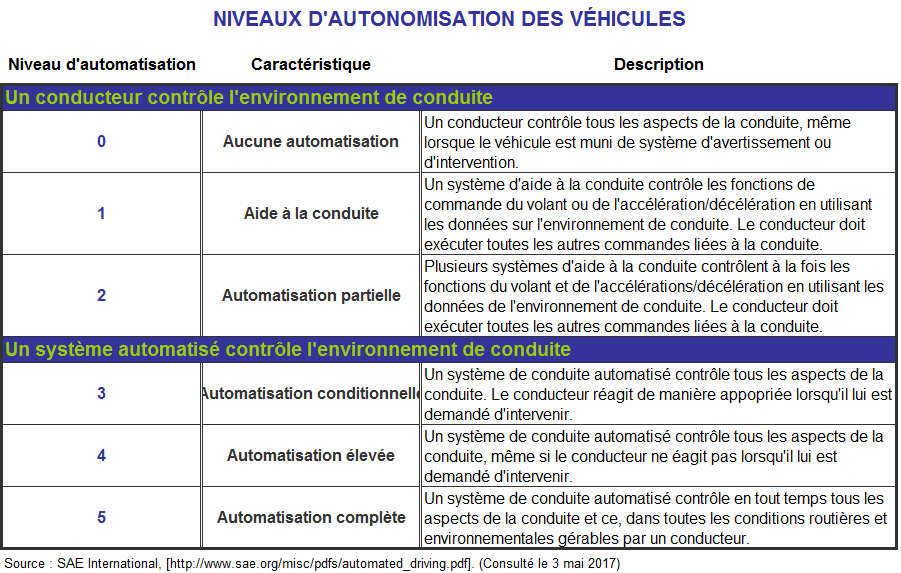
Les spécialistes distinguent généralement cinq niveaux d’automatisation (voir tableau ci-dessous), allant de partiellement autonome (Classe 1) à complètement autonome (Classe 5). Aucun véhicule autonome à 100 % n’a encore été développé. Toutefois, le niveau d’automatisation devrait augmenter avec la progression du développement technologique.
Ce bulletin vise à présenter l’expertise de pointe montréalaise dans le domaine des véhicules autonomes. Qu’il s’agisse de recherche et développement ou de dynamisme entrepreneurial, la réputation de Montréal en matière d’innovation et de créativité n’est plus à faire. La métropole québécoise occupe une place importante dans ce domaine émergent.
Dans un premier temps, nous présentons les principales technologies qui façonnent ces véhicules intelligents. Puis, nous nous intéressons aux avantages que procure cette nouvelle forme de mobilité. Nous offrons ensuite un aperçu de l’évolution du marché mondial avant de nous attarder au développement des technologies de pointe à Montréal. La section suivante est consacrée aux entreprises innovantes dont la réputation dépasse les frontières nationales. En conclusion, nous résumons les principaux points à retenir, en faisant mention des initiatives en cours à la Ville de Montréal en lien avec les véhicules autonomes.
VÉHICULES AUTONOMES : UNE RUPTURE TECHNOLOGIQUE
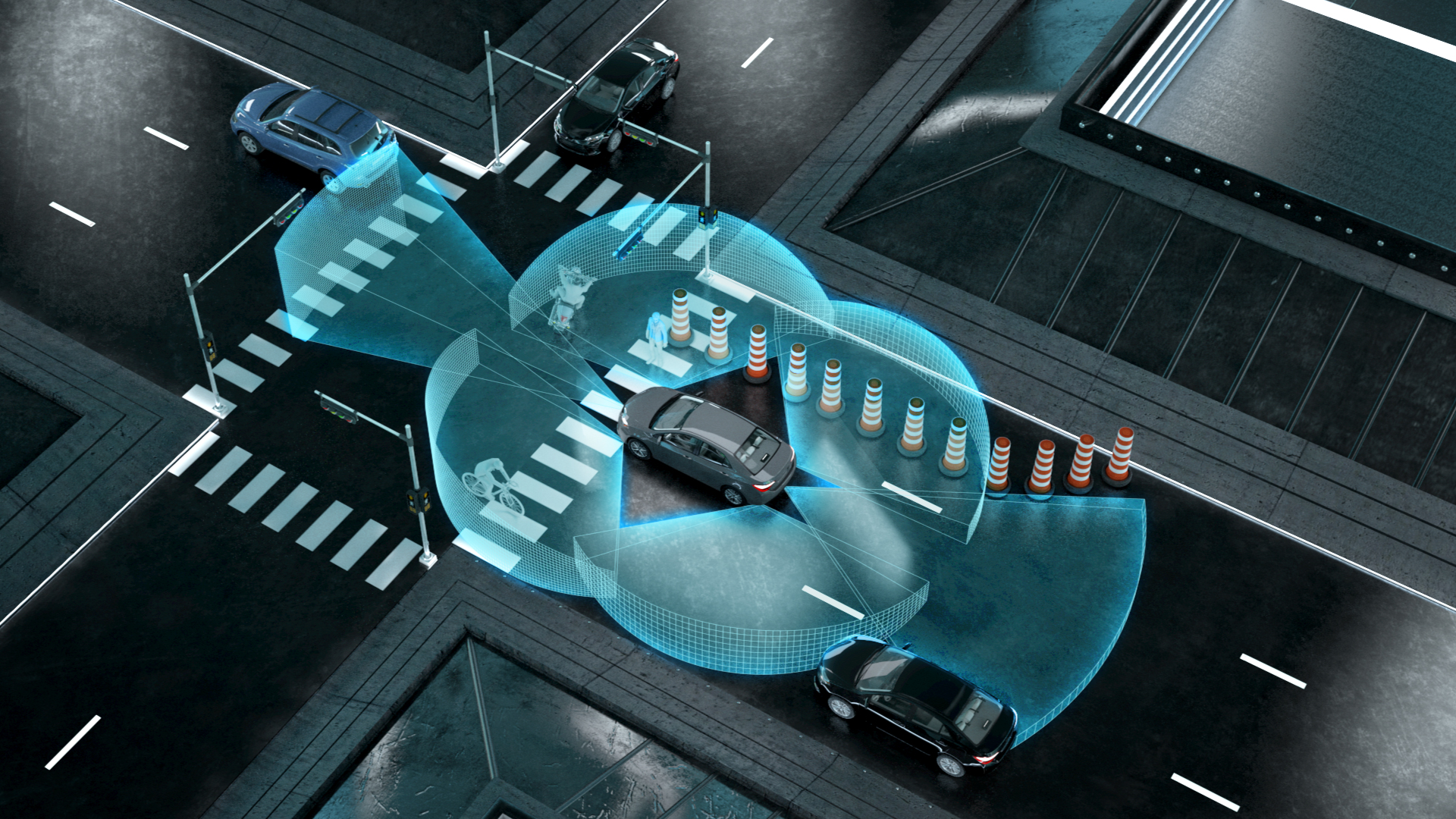
Les véhicules autonomes, qui sont une application de la robotique mobile, s’appuient sur les progrès technologiques récents, dont les systèmes de communication sans fil de nouvelle génération, tels que les capteurs (radars, caméras, infrarouges, ultrasons, lidars, etc.), les systèmes de navigation et de localisation (GPS, cartographies, etc.) et même les logiciels embarqués (systèmes informatiques et électroniques autonomes). Ces derniers sont mis au point grâce à la fusion des données provenant des capteurs et des systèmes de navigation, en employant des algorithmes d’intelligence artificielle. Ainsi, un véhicule autonome est en mesure de reconstruire son environnement 3D par la reconnaissance des formes (chaussées, voies, véhicules, obstacles, panneaux, bornes, etc.) pour décider de l’action à réaliser (accélérer, freiner, dépasser, changer de voie, s’arrêter, etc.).
- Le robot mobile est une machine équipée de capacités de perception, de traitement de l’information, de décision et d’action lui permettant d’agir de manière autonome dans un environnement donné. Il est constitué d’un ensemble de technologies, dont des capteurs, des interfaces de communication (écran, WiFi, etc.), des unités d’alimentation (batteries) et des logiciels qui intègrent des algorithmes de modélisation de l’environnement. Avec les avancées technologiques comme l’intelligence artificielle, ce type de robot est en mesure de simuler le comportement de l’être humain et sa façon de penser. Cela ouvre la voie à de nouvelles applications, comme les véhicules autonomes, les jeux intelligents, l’assistance médicale robotisée, les drones et bien plus.
- Les capteurs sont des dispositifs dotés d’une sensibilité de détection d’un phénomène déterminé et capables de prélever des informations sur le comportement physique et de les transformer en un signal (généralement électrique). Les informations captées sont ensuite envoyées à des unités de logiciels qui utilisent des algorithmes de traitement de l’information. Dans les nouvelles applications comme les véhicules autonomes où le facteur humain est important, leur mise en œuvre se doit d’être très précise dans la mesure d’un paramètre de l’environnement physique.
- Le lidar (en anglais « Light Detection And Ranging ») est une technique de télédétection par laser qui émet une lumière invisible à l’œil nu et sert à mesurer avec précision la distance et la forme des objets. D’après plusieurs analyses, il est permis de s’attendre à ce que la technologie lidar devienne un élément central dans la gamme de capteurs destinés aux véhicules autonomes.
- L’intelligence artificielle (IA) permet aux machines ou aux logiciels embarqués de formaliser le comportement des êtres humains, comme la capacité de percevoir, de raisonner, d’analyser, de prendre des décisions et d’agir. Dans le domaine des véhicules autonomes, elle permet de trier les informations que l’ordinateur de bord reçoit des capteurs, de les analyser et de prendre une décision sur la démarche à suivre (accélérer, tourner à gauche, s’arrêter pour éviter un obstacle, etc.).
VÉHICULES AUTONOMES : DES AVANTAGES NON NÉGLIGEABLES
L’adoption massive de véhicules autonomes aura d’énormes avantages socio-économiques et des implications pour les entreprises de l’automobile ainsi que pour d’autres industries, comme le secteur manufacturier, les transports, la logistique, les assurances, les infrastructures urbaines et même le domaine de la santé.
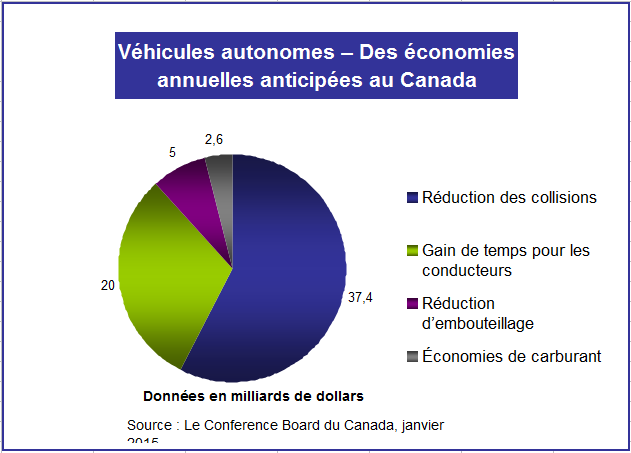
Selon un rapport publié en 2015 par le Conference Board du Canada, l’arrivée des véhicules automatisés pourrait générer 65 milliards de dollars d’économie potentielle par an aux Canadiens en raison notamment d’une réduction des embouteillages, de la perte de temps au volant, et des coûts liés aux collisions et au carburant. Ce rapport a mis en lumière plusieurs avantages rattachés à ce type de véhicules :
- La sécurité: l’absence d’intervention d’un conducteur pourrait éliminer la plupart des collisions causées par une erreur humaine;
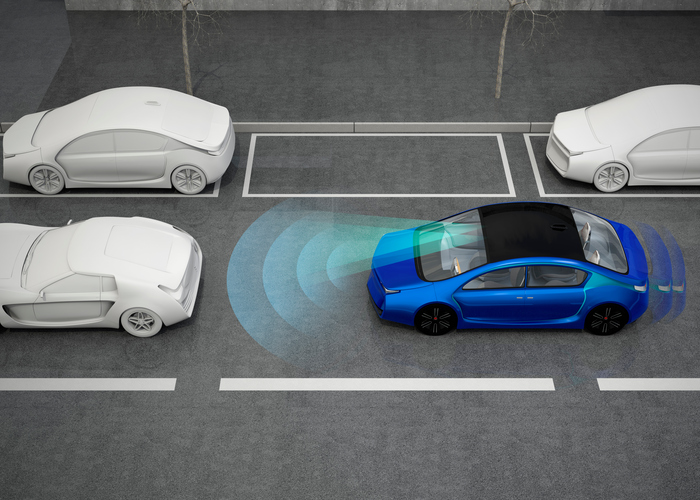
- La diminution des besoins en stationnement: les véhicules autonomes pourraient réduire l’achat de véhicules et se diriger plus facilement vers un stationnement gratuit;
- L’accessibilité des transports : les véhicules autonomes offrent un moyen de transport plus accessible aux personnes à mobilité réduite;
- Des municipalités plus vertes: transformation de certains espaces de stationnement en espaces verts; consommation en carburant plus faible que celle des véhicules traditionnels, grâce notamment à l’optimisation du trajet, à l’utilisation des technologies des véhicules connectés, ainsi qu’à l’accélération et au freinage en douceur;
- Les synergies avec les véhicules électriques: grâce à la miniaturisation à venir des batteries et de leur chargement rapide, les véhicules électriques pourraient être utilisés comme taxis autonomes pour des déplacements urbains;
- Le transport en commun personnalisé à faible coût : les véhicules autonomes pourraient favoriser de nouveaux services (ex. : taxi autonome) et réduire ainsi la nécessité de certains projets de transport en commun;
- Le transport comme service: les entreprises de covoiturage pourraient lancer de nouveaux services
UN MARCHÉ MONDIAL QUI S’ACCÉLÈRE
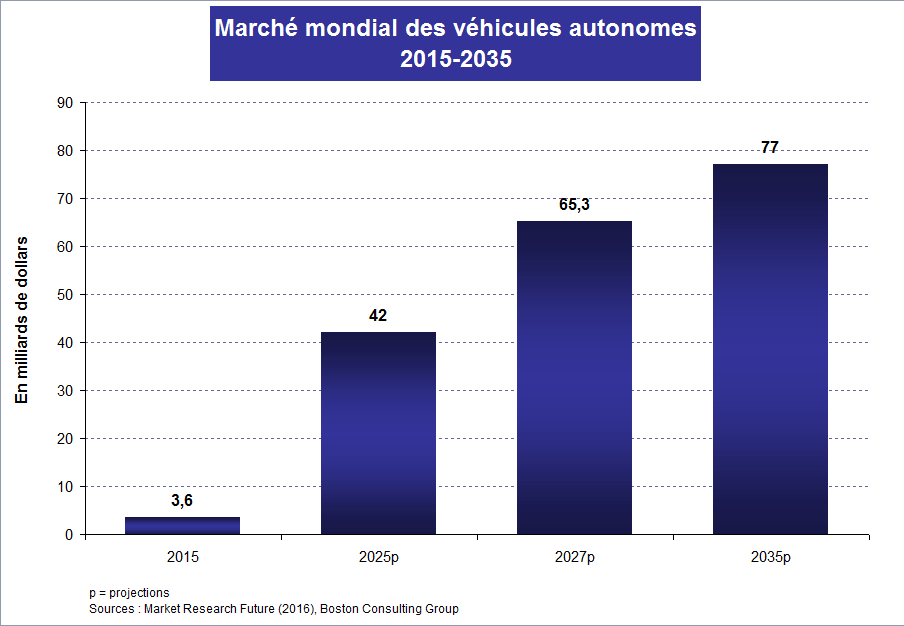
Les véhicules autonomes sont appelés à gagner en importance au cours des prochaines années. Ils pourraient représenter un marché de 42 milliards de dollars d’ici 2025. Il s’agit d’une croissance annuelle de 28 % sur dix ans. Sur une plus longue période, soit de 2015 à 2035, ce marché devrait croître à un taux annuel moyen de 16,5 %.
Selon une autre étude réalisée par la firme A.T. Kearney, en tenant compte des impacts sur d’autres secteurs (développement d’applications mobiles, de services de mobilité, d’équipements spéciaux comme le guidage et les systèmes de communication, etc.), ce marché devrait atteindre 560 milliards de dollars d’ici 2035.
LA RECHERCHE ET LE DÉVELOPPEMENT DE POINTE ÉVOLUENT À MONTRÉAL
La démocratisation des véhicules autonomes reste fortement conditionnée par les avancées technologiques. À Montréal, des chercheurs et des entreprises s’activent pour faire de la métropole une référence mondiale dans ce secteur émergent. Qu’il s’agisse de capteurs sans fil de future génération, d’algorithmes de précision et de contrôle ou même de nouvelles applications destinées à l’assurance du futur, les innovations technologiques concernant les véhicules autonomes ne se font pas attendre à Montréal.
René Jr. Landry | Laboratoire des technologies spatiales, systèmes embarqués, navigation et avionique (LASSENA)

Le professeur René Jr. Landry de l’École de technologie supérieure (ÉTS) de Montréal et directeur du LASSENA est actif en recherche dans différents domaines qui couvrent plusieurs applications, entre autres en transport, relativement aux véhicules autonomes et connectés. Ses recherches en lien avec ces véhicules du futur concernent différents sujets, notamment le développement de systèmes embarqués intelligents, de dispositifs mobiles pour la navigation hautement robuste et la localisation précise, ainsi que les communications sans fil fiables et sécuritaires. En outre, les normes et les certifications liées à ces formes de mobilité, notamment pour l’assurance automobile, constituent un volet de recherche priorisé par l’équipe du LASSENA. La synergie et la complémentarité entre les domaines du transport routier autonome et l’aviation civile internationale, dont l’avionique en particulier, sont frappantes.
En matière de communication sans fil intervéhiculaire et sécuritaire, les dispositifs ultra-intégrés nommés Micro-iBBs et Nano-iBBs constituent des plateformes de recherches puisqu’ils sont déjà équipés, dans certains cas, de modules Bluetooth, WiFi et LTE. Ainsi, des thèmes de recherche sont focalisés sur l’amélioration de la qualité de service (QOS), la sécurité des protocoles de communication entre deux ou plusieurs véhicules (V2V) et entre le véhicule et l’infrastructure (V2I), et le développement des applications d’Internet des objets pour la navigation automobile. La communication des véhicules avec l’environnement, c’est-à-dire avec les infrastructures des villes et des routes, est également au cœur de la problématique des véhicules autonomes.
Parmi les différentes technologies mises au point pour la navigation précise ainsi que le guidage autonome, notons le développement de systèmes de détermination d’attitude robustes et précis, d’algorithmes de localisation avancés, de calibrage de carte comme Google Maps, de systèmes de suivi de flottes de véhicules et de diagnostic d’accident. Très utilisés dans l’avionique, ces algorithmes sont conçus grâce à la fusion des données provenant de capteurs autonomes, tels que des caméras de type radar ou lidar, et à différentes technologies émergentes, dont les capteurs MEMS (accéléromètres, gyromètres et magnétomètres), les puces RFID et les récepteurs GNSS à haute sensibilité. Ces technologies permettront notamment à un véhicule autonome de se localiser, de reconstruire son environnement en temps réel et de détecter les objets en mouvement, et ce, avec une haute précision. En outre, ils serviront à une gestion optimale d’une flotte de véhicules en toute sécurité, en utilisant les standards de l’aviation civile internationale, en particulier pour des scénarios d’utilisation complexes, tels que la livraison de colis automatisée, la gestion d’une flotte de taxi autonome dans un centre-ville ou de camion lourd autonome évoluant sur de grands territoires.
Pour avoir les meilleurs repères possible, les recherches entreprises par le professeur Landry et son équipe favorisent le développement d’algorithmes avancés permettant d’obtenir des solutions efficaces, et ce, même dans des environnements dits hostiles, comme des tunnels, des canyons urbains ou des conditions environnementales non idéales (brouillard, glace, neige intense, forêts, route sans repères, etc.). Toujours pour une navigation de haute précision, les recherches en cours visent également la conception de commandes de guidage autonome pouvant être appliquées à des véhicules terrestres et aériens (drones, véhicules aériens sans pilote ou UAV).
Les aspects non technologiques (normes, réglementations) de ces véhicules du futur sont également considérés dans les activités du laboratoire de recherche LASSENA, afin de tenir compte du rôle du détenteur du véhicule en cas de partage autonome du véhicule, d’accidents ou d’incidents, même mineurs. En effet, les chercheurs développent de nouvelles méthodes de mesures et des métriques innovatrices, en se basant sur les données provenant notamment des boîtes noires, permettant l’analyse en temps réel et/ou en post-traitement du comportement de conduite des véhicules du futur. Les résultats de cette recherche permettront par exemple de concevoir de nouvelles primes d’assurance automobile pour les véhicules autonomes du futur, à savoir : « Pay As You Drive (PAYD) » (Ne payez que les kilomètres parcourus), « Pay How You Drive (PHYD) » (Payez selon votre conduite) ou « Pay Where You Drive (PWYD) » (Payez selon les infrastructures publiques utilisées).
Youmin Zhang | Networked Autonomous Vehicles (NAV) Lab
L’équipe dirigée par le professeur Youmin Zhang au Laboratoire NAV de l’Université Concordia a développé diverses technologies de pointe pour des véhicules autonomes, comme les véhicules aériens sans pilote (UAV ou drones), les voitures autonomes (AC), les véhicules terrestres sans pilote (UGV), les véhicules de surface sans équipage (USV) ainsi que les véhicules sous-marins sans équipage (VSSE). Les recherches du professeur Zhang ont pour objectif de rendre les véhicules autonomes plus sûrs, plus fiables et intelligents, avec un niveau d’autonomie plus élevé. Elles sont principalement axées sur la conception et le développement de cadres complets intégrant la détection et le diagnostic de pannes en ligne (système FDD), le contrôle de tolérance aux pannes (système FTC) et les systèmes de guidage et de navigation ayant une capacité de détection et d’évitement (« Sense & Avoid » ou S & A).
Les systèmes FDD développés surveillent l’état de santé des actionneurs, des capteurs et des batteries des véhicules en temps réel. Un tel système permet de prévenir l’opérateur qu’il doit effectuer l’entretien du véhicule ou un guidage (processus visant à imposer une trajectoire à un véhicule), une navigation et un contrôle (GNC) reconfigurables ou de tolérance en temps réel pour la poursuite du fonctionnement du véhicule autonome. En outre, il peut prévenir de la durée de vie restante de toute partie endommagée. Bien que le système FDD soit un processus très important, seul, il ne suffit pas pour assurer le bon fonctionnement des véhicules autonomes. Pour ces derniers, la continuité de l’opération est une caractéristique essentielle et les véhicules devraient être en mesure de maintenir leur performance en matière de stabilité, de qualité et d’accomplissement de mission, et ce, en toute sécurité malgré la présence de pièces endommagées, d’où le besoin d’un système FTC qui agit comme un système de contrôle de bas niveau dans les véhicules autonomes. Celui-ci peut supporter les dysfonctionnements d’une composante du véhicule et maintenir sa stabilité ainsi que les performances nécessaires pour qu’il continue son fonctionnement en toute sécurité. Pendant les opérations, si un actionneur ou un capteur est brisé ou endommagé, le système FTC reconfigure la stratégie de contrôle de bas niveau pour permettre aux véhicules de continuer à fonctionner.
De plus, les véhicules autonomes fonctionnent dans un environnement complexe où une méconnaissance de leur environnement peut entraîner une collision. Par conséquent, la capacité de détection et d’évitement (S & A) est un sous-système essentiel pour tous les types de véhicules autonomes. Différentes conditions d’évitement d’obstacles sont ainsi étudiées et testées au sein du Laboratoire NAV. Les stratégies de guidage et de navigation en ligne peuvent permettre la planification globale et locale des véhicules autonomes en mode bidimensionnel (2D, UGV/AC et USV) ou en 3D (pour les UAV et les satellites). Sur la base des informations issues des technologies de détection et des systèmes FDD, les sous-systèmes de guidage et de navigation peuvent générer une série de trajets en temps réel et une planification de trajectoires pour les véhicules afin d’éviter les collisions et de compenser les pannes ou les dommages, avec l’aide du système FTC. Avec le système de guidage, de navigation et de contrôle en ligne développé, lorsque des obstacles sont détectés, le véhicule peut réorganiser son chemin pour éviter toute collision et accomplir la mission qui lui est assignée. De multiples véhicules autonomes peuvent également être utilisés pour accomplir une mission en coopération. Au cours de la mission, si un ou plusieurs véhicules rencontrent des difficultés, les autres véhicules devraient réorganiser leur chemin pour éviter les collisions avec les véhicules endommagés. En outre, les véhicules endommagés pourront trouver un moyen sûr de se rendre à destination avec un niveau de performance acceptable. Ces différents systèmes s’appliquent à tous les types de véhicules autonomes (UAV, AC, UGV, USV et VSSE).
En collaboration avec plusieurs entreprises montréalaises comme Marinvent Corporation, OPAL-RT Technologies, Pegasus Research & Technologies et d’autres sociétés canadiennes, les technologies développées par l’équipe du professeur Zhang ont été vérifiées expérimentalement. Les tests ont été faits en incorporant les systèmes FDD et FTC, ainsi que les dernières technologies émergentes en cas de faute, notamment le « contrôle coopératif tolérant » (FTCC). Ce dernier permet à plusieurs véhicules de travailler de manière coopérative à des fins de surveillance et de détection de défauts ou de dommages. Enfin, outre les véhicules autonomes, le groupe du professeur Zhang entreprend des recherches sur les sources d’énergie renouvelables et les réseaux intelligents. Les technologies développées et présentées ici peuvent également être appliquées à ces domaines émergents en mettant un accent sur la sécurité, en améliorant par exemple la fiabilité et la disponibilité des parcs éoliens et des réseaux électriques intelligents. Le professeur Zhang est également membre de l’Institut de conception et innovation aérospatiale de Concordia (CIADI) et dirige le Laboratoire Diagnostic, Flight Control and Simulation (DFCS).
Ke Wu | Centre de recherche avancée en micro-ondes et en électronique spatiale (POLY-GRAMES)
Le professeur Ke Wu, directeur du centre de recherche POLY-GRAMES affilié à Polytechnique Montréal, développe des technologies sans fil de future génération, notamment la connectivité intelligente. Selon le chercheur, les systèmes de communication actuels posent trois principaux freins au déploiement des véhicules autonomes : une vitesse limitée pour la transmission de données, une mobilité limitée due à un décalage de fréquence d’une onde et un temps de réponse très long. Dans le but de répondre à ces problèmes, il a étudié et démontré l’apport de futurs systèmes sans fil qui permettraient la transmission de données à une vitesse ultrarapide et une capacité de détection à haute résolution (capteurs, imagerie, identification à travers les murs et le brouillard, etc.) et d’une grande précision. Ses recherches en cours visent spécifiquement le développement des technologies des récepteurs/émetteurs sans fil multifonctionnels et des plateformes technologiques d’intégration.

La mise au point des technologies des récepteurs/émetteurs multifonctionnels, qui répondront à divers besoins suivant les performances exigées par différentes applications émergentes, concerne à la fois les communications sans fil, les capteurs sans fil et la transmission de puissance (énergie) sans fil. Grâce à leur capacité de transmission des signaux sur un réseau étendu, par exemple, les capteurs sans fil de prochaine génération permettront notamment aux véhicules connectés et autonomes de capter et de partager en temps réel des informations comme la distance, la vitesse, la température et l’humidité.
Les plateformes technologiques d’intégration s’intéressent quant à elles à l’étude et au déploiement de techniques de fabrication qui permettront de réaliser des circuits et des systèmes sans fil à faible coût, de petite taille, et à haute performance, critiques pour les futures applications massives, telles que l’Internet des objets et les systèmes de positionnement global (GPS). Ces derniers permettent notamment aux véhicules du futur d’identifier et de localiser de façon précise des objets (voitures, bicyclettes, poussettes, etc.) et des personnes à différentes positions dans des environnements de proximité.
Selon le chercheur, ces technologies sans fil de future génération recèlent quatre principaux avantages ou cibles paramétriques :
- une grande efficacité spectrale qui favorise une transmission rapide de données avec un débit plus élevé;
- une grande efficacité énergétique;
- une grande efficacité spatiale;
- une grande efficacité décisionnelle.
Plusieurs industries émergentes tireront profit de la puissance de ces technologies, entre autres les véhicules connectés et autonomes, la ville intelligente, le secteur manufacturier (production automatisée), la sécurité, l’intelligence artificielle, la réalité virtuelle, la télémédecine et même les énergies propres.
Les recherches du professeur Wu ont mené jusqu’ici à l’obtention d’environ 40 brevets dans le domaine des technologies sans fil, de la radiofréquence et des micro-ondes, ainsi qu’à plus de 1 100 publications scientifiques. Par ailleurs, en 2016, il est devenu le titulaire de la première chaire de recherche de Huawei Technologies dans le monde, en collaboration avec le CRSNG. Il s’agit de la Chaire FuWiC sur les technologies sans fil du futur accueillie au sein de POLY-GRAMS.
Maarouf Saad | Groupe de recherche en électronique de puissance et commande industrielle (GRÉPCI)
Le professeur Maarouf Saad de l’ÉTS et son équipe effectuent des recherches sur le développement des applications en robotique, entre autres les robots mobiles, en s’appuyant notamment sur la mécatronique (synergie entre mécanique, électronique et informatique). Plus précisément, ils développent l’infrastructure matérielle des robots, des algorithmes de génération trajectoire et des circuits électriques. D’abord, l’infrastructure matérielle des robots autonomes inclut toute la partie sensorielle, notamment les caméras ou de systèmes de vision, la télédétection par laser (lidar), les capteurs de distance (sonars), la position (encodeur) et même les systèmes de géolocalisation (GPS). Ensuite, les algorithmes mis au point, qui incluent également la fonction de commande, permettent le suivi autonome des véhicules d’un point initial à un point final ou le stationnement de façon autonome du robot. Ces algorithmes tiennent compte des aspects d’évitement d’obstacles statiques (bornes, voitures stationnaires, etc.) ou dynamiques (objets ou personnes en mouvement). Grâce aux algorithmes développés, le robot est capable de faire une cartographie de l’environnement pour déterminer la meilleure trajectoire à suivre (aspect sécurité). Finalement, les systèmes embarqués (logiciels) conçus permettent une gestion intelligente du véhicule autonome et servent à lui indiquer la décision à prendre (tourner, arrêter, poursuivre, etc.). Grâce à de tels systèmes, le robot serait ainsi en mesure d’interpréter les signaux externes (flux de circulation, états de la route, etc.) et de tenir compte des décisions prises par l’algorithme.
Les recherches du professeur Saad sont entreprises au sein du GRÉPCI, un groupe de recherche ayant une expertise dans des domaines aussi variés que la robotique, l’électronique de puissance et les énergies renouvelables.
Jérôme Le Ny | Laboratoire de robotique mobile et des systèmes autonomes
Le professeur Jérôme Le Ny, directeur actuel du Laboratoire de robotique mobile et des systèmes autonomes de Polytechnique Montréal, développe des algorithmes visant à augmenter l’autonomie des systèmes autonomes, qu’ils soient aériens ou terrestres. Son équipe s’intéresse à l’ensemble des problèmes posés par le développement de ces systèmes, qui doivent en temps réel percevoir leur environnement, planifier leurs décisions, et de plus en plus collaborer entre eux. À la différence des robots actuels qui nécessitent souvent la présence d’un pilote et qui fonctionnent dans des environnements bien définis et contrôlés, les recherches du professeur Le Ny sont entreprises dans l’optique d’avoir des algorithmes de décision capables de fonctionner en présence d’incertitudes importantes, par exemple dans des lieux mal connus, tout en restant sécuritaires. Pour y parvenir, le chercheur doit combiner un ensemble de données provenant de divers capteurs, notamment des caméras et/ou des lidars, afin de reconstruire un modèle 3D de l’espace entourant le robot, ce qui permet ensuite à ce dernier de planifier ses actions dans son environnement. Ses recherches récentes concernent entre autres le développement d’algorithmes permettant l’inspection automatisée de grandes structures, comme les bâtiments ou les éoliennes, ou encore la surveillance de sites par des drones. Ses étudiants, en collaboration avec ceux de son collègue, le professeur David Saussié, sont récemment parvenus à faire atterrir automatiquement un drone sur une voiture roulant à plus de 50 km/h. Ce succès pourrait entre autres avoir des implications pour la livraison de colis. Cette expertise montréalaise a notamment été mise à profit dans des partenariats avec des entreprises développant des drones, et avec l’Institut de recherche d’Hydro-Québec, relativement à des projets d’inspection.
Bien que les recherches du professeur Le Ny ne portent pas directement sur les voitures autonomes, les outils qu’il développe pourraient être utiles dans ce domaine. Cependant, selon le chercheur, les algorithmes de décision sont développés pour une application particulière et pour un certain niveau de complexité de l’environnement. Ainsi, une voiture autonome circulant dans un centre-ville ou dans des conditions météorologiques difficiles fait face à des contraintes plus exigeantes qu’un robot inspectant un bâtiment sur un chantier à l’accès réglementé. Le niveau d’autonomie et la garantie de la sécurité des voitures autonomes pourraient toutefois susciter son intérêt dans ses recherches à venir.
DES PME QUI CONTRIBUENT À FAIRE RAYONNER LES VÉHICULES AUTONOMES
Dans cette ère de compétition internationale en mobilité intelligente, marquée par une concurrence en innovation technologique, les villes peuvent compter sur le savoir-faire des petites et moyennes entreprises (PME). Dans le domaine des véhicules autonomes, les PME de Montréal et de Québec se taillent une place remarquable, qui mérite d’être mentionnée.
LeddarTech| Experts en technologie LiDAR pour des applications de conduite autonome
La capacité de percevoir l’environnement qui l’entoure et de numériser de façon exhaustive tout objet en mouvement ou fixe est un enjeu fondamental pour la conduite autonome. LeddarTech est un leader québécois reconnu dans la technologie de détection et de télémétrie LiDAR utilisée pour détecter, localiser et mesurer la distance entre un véhicule et des objets et/ou des personnes dans un champ de vision donné. L’entreprise essaimée par l’Institut national d’optique (INO) il y a maintenant une décennie, se distingue par une importante propriété intellectuelle avec 52 brevets déposés jusqu’ici.
LeddarTech est le développeur et propriétaire du Leddar, une technologie de détection Lidar novatrice composée d’un ensemble de logiciels et d’algorithmes de traitement qui digitalisent le signal lumineux du capteur, permettant d’accroitre leur performance, de réduire les coûts de production, et de permettre une utilisation efficace dans des conditions environnementales très difficiles. Le Leddar est offert sous forme de modules de détection, qui sont prêts à être utilisés dans des applications spécialisées telles que la gestion des transports, la sécurité, les drones, la production industrielle, et sous forme de circuits intégrés qui permettent de répondre aux secteurs requérant du très grand volume et des coûts optimisés comme l’automobile. LeddarTech accélère le pas dans cette lucrative industrie vouée à une expansion rapide où la plupart des manufacturiers cherchent à intégrer des solutions Lidar. L’entreprise a présenté au CES en janvier 2017 de nouvelles configurations de capteurs démontrant sa future offre de Lidar 2D et 3D de type « solid-state ». Offrant des matrices de points allant jusqu’à 512 x 64, ces capteurs destinés à supporter les applications de conduite assistée et autonome seront bâtis à partir de nouvelles générations de circuits intégrés LeddarCore.
La première percée de LeddarTech dans le domaine automobile a été réalisée en 2014 avec une entente de licence des algorithmes Leddar accordée à l’équipementier automobile Valéo, ce qui a permis à l’entreprise de démontrer l’adaptabilité de sa technologie pour la fabrication de capteurs visant ce marché clé. Aujourd’hui, c’est tout un écosystème Leddar que LeddarTech est en train de mettre en place pour desservir l’industrie automobile et permettre la production de capteurs Leddar à partir de différents fournisseurs accrédités de microprocesseurs (Texas Instrument et Renesas) et de composantes optiques (Osram, Hamamatsu, Excelitas). L’entreprise est également en discussion avec plusieurs manufacturiers majeurs de composantes automobiles et espère être en mesure d’annoncer la mise en marche de projets conjoints de développement au cours de l’année 2017. Déjà en février 2017, LeddarTech confirmait une entente avec la forme allemande IDT, qui sera en charge de produire les circuits intégrés LCA2, alors que le partenaire pour la génération LCA3 devrait être annoncé sous peu.
Pegasus Research & Technologies
Pegasus Research & Technologies, spécialisée dans la simulation, l’intelligence artificielle, la robotique et les systèmes autonomes, fournit des services de recherche et d’ingénierie dans le secteur de l’aérospatiale et de la défense. Depuis deux ans, cette entreprise montréalaise met au point un module de contrôle de mission (« Intelligent Mission Controller » ou IMC) destiné aux drones et aux robots terrestres.
L’IMC assure une exécution de mission en toute sécurité grâce au système embarqué de surveillance de santé (« Embedded Health Monitoring System » ou eHMS) qui surveille les indications des batteries, des moteurs et des capteurs de navigation afin de prévenir des pannes, éviter des collisions et empêcher la perte des engins. En parallèle, grâce au traitement embarqué, l’IMC permet l’exécution de tâches complexes, telles que la collecte et la validation des images, la reconstruction 3D et la reconnaissance, l’analyse d’objets, voire l’inspection d’un bâtiment. Pegasus a également mis au point un prototype de drone intelligent équipé d’un capteur infrarouge afin de proposer une capacité hautement automatisée pour les missions de recherche et de sauvetage. Par ailleurs, Pegasus a ses bureaux au Centre de recherche informatique de Montréal (CRIM), avec qui elle collabore sur des projets de vision par ordinateur.

OPAL-RT Technologies est une entreprise montréalaise qui conçoit des outils pour le développement et les tests des systèmes de contrôle dans les domaines électrique et électronique. Elle fournit aux ingénieurs et aux chercheurs des technologies de simulation en temps réel accessibles et de pointe pour accélérer le développement de produits plus performants, et ce, dans une perspective de transmission d’énergie plus fiable. Depuis 1997, plusieurs industries comme l’automobile, l’aérospatiale et l’énergie se sont de plus en plus tournées vers OPAL-RT, transformant l’entreprise en un leader mondial en simulation en temps réel et matériel d’essai pour des systèmes électromécaniques et électroniques de puissance. Aujourd’hui, OPAL-RT participe activement à la simulation, à la validation et à la certification des véhicules autonomes. Grâce à son expertise, les constructeurs automobiles peuvent tester l’ensemble des cas de conduite autonome avant les essais sur route. L’entreprise développe des plateformes qui intègrent plusieurs types de modèles de simulation, tels que les infrastructures des villes, le trafic, les piétons et les cyclistes ou encore des modèles de caméras, de radars et de contrôleurs automobiles (intelligence artificielle). Ces plateformes permettent aux constructeurs automobiles de simuler plusieurs millions de kilomètres avant d’utiliser nos routes.
L’arrivée des véhicules autonomes représente une opportunité unique pour Montréal. Elle pourrait en effet favoriser la santé de la Ville, la rendre plus verte, plus intelligente et même plus accessible. L’apport de l’aspect recherche et développement, ainsi que des PME innovantes en la matière est indéniable. Les technologies présentées ici, qui ne sont toutefois pas un portrait exhaustif des développements en cours dans ce domaine, sont révélatrices du savoir et de la créativité des acteurs montréalais dans cette industrie émergente. De plus, ces technologies en pleine évolution offrent sans aucun doute une occasion pour Montréal de tirer profit du savoir-faire des autres régions du Québec.
Toutefois, le développement des véhicules autonomes se heurte encore à certains défis qui devront être pris en compte pour assurer le déploiement à grande échelle de tels véhicules. Parmi ceux-ci, la réglementation, la protection de la vie privée, l’assurance automobile, la planification urbaine et l’aménagement des infrastructures publiques sont des enjeux au cœur des préoccupations des décideurs montréalais.
La Ville de Montréal a récemment lancé son Institut de l’électrification et des transports intelligents. L’intégration des innovations sur les enjeux de mobilité durable dans la réglementation municipale sera un défi au cœur de la mission de ce nouvel institut. En outre, la Ville entend mettre en place une zone d’expérimentation au centre-ville pour effectuer des tests en condition réelle. Cette annonce, qui démontre l’intérêt de la municipalité, est donc de bon augure pour l’avenir des véhicules autonomes à Montréal.
RÉFÉRENCES PRINCIPALES
- Borden Ladner Gervais (2016). « Les véhicules autonomes : une véritable révolution ». http://blg.com/fr/Nouvelles-Et-Publications/Documents/Vehicules-autonomes.pdf
- Le Conference Board du Canada (janvier 2015). « Automated Vehicles. The Coming of the Next Disruptive Technology ». http://www.cavcoe.com/articles/AV_rpt_2015-01.pdf


