The transportation sector has entered a period of profound change, with new mobility solutions leading the way, perhaps none more important than autonomous vehicles.
According to the Boston Consulting Group, sales of fully autonomous and semi-autonomous vehicles could reach 18 million per year by 2035. Vehicles with autonomous systems are expected to account for 25% of the new vehicle market.
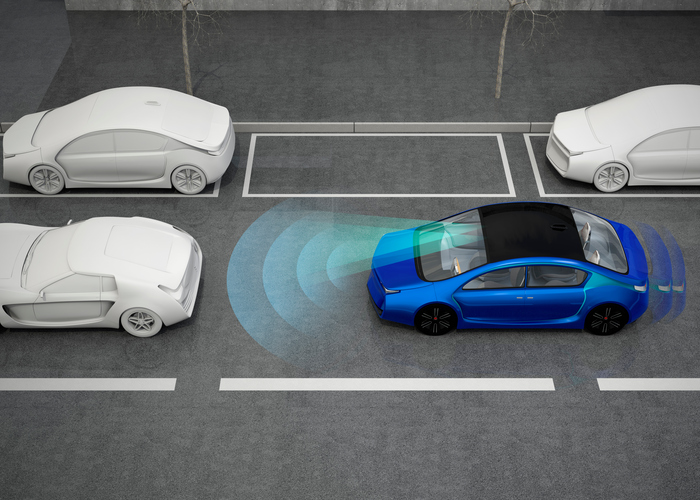
Autonomous vehicles – also referred to as self-driving cars – use information captured to safely make the same decisions (braking, passing, parking, turning left or right, etc.) a driver makes. They apply various technologies, including wireless technologies already used in connected vehicles, to give drivers the information they need to move. They are also capable of bidirectional communication with other vehicles (“vehicle to vehicle” or V2V) and road infrastructures (“vehicle to infrastructure” or V2I) for purposes of optimizing safety, improving mobility, and even reducing environmental impacts. It is important to distinguish between these two types of vehicles, however. A vehicle may be connected without being autonomous, whereas an autonomous vehicle must be connected.
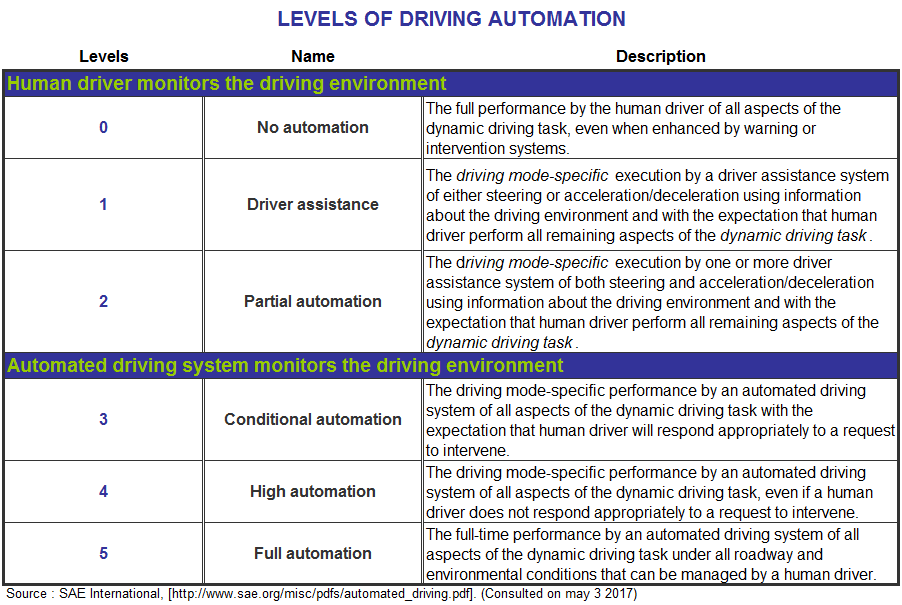
Specialists distinguish between five levels of automation (see table below), from semi-autonomous (Class 1) to fully autonomous (Class 5). And while a 100% autonomous vehicle has yet to be developed, the level of automation will continue to progress, in step with technological advances.
This article presents Montréal’s leading-edge expertise in the autonomous vehicle sector. When it comes to research and development and entrepreneurial dynamism, Montréal has a richly deserved reputation for innovation and creativity, and Québec’s largest city has staked out an important place in this emerging field.
First, the main smart car technologies are explained, citing the advantages offered by this new form of mobility. An overview of this rapidly growing global market is then presented, with a look at the Montréal-based companies developing leading-edge technologies that are creating a buzz well beyond our borders. In conclusion, the main points are summarized, with reference to autonomous vehicle initiatives put forward in Montréal.
AUTONOMOUS VEHICLES: A TECHNOLOGICAL BREAKTHROUGH
Autonomous vehicles, an application of mobile robotics, draw on recent technological advances, including new-generation wireless communication systems such as sensors (radar, cameras, infrared, ultrasound, lidar, etc.), navigation and localization systems (GPS, mapping, etc.) and even on-board software (autonomous information and electronic systems). On-board software is developed by merging data from the sensor and navigation systems, and using artificial intelligence algorithms. This allows the autonomous vehicle to reconstruct its environment in 3D through form recognition (e.g., road surfaces, lanes, vehicles, obstacles, signs, fire hydrants, etc.) so that it can decide what to do (accelerate, brake, pass, change lanes, stop, etc.).
- The mobile robot is a machine capable of perception, information processing, and decision-making, thereby allowing it to act autonomously in a specific environment. It uses a set of technologies, including sensors, communications interfaces (screen, Wi-Fi, etc.), power units (batteries), and software with environmental modelling algorithms. With technological advances in artificial intelligence, this type of robot is able to simulate human behaviour and thought, thus paving the way for new applications such as autonomous vehicles, smart games, robotic medical assistance, and drones, to name a few.
- Sensors are devices designed to detect a given They collect information on physical behaviour and transform it into a signal (generally electric). The information is then transmitted to software units, where it is processed using algorithms. In new applications such as autonomous vehicles, where the human factor remains important, they must be precisely calibrated to measure a parameter in the physical environment.
- Lidar (“Light Detection and Ranging”) is a laser remote sensing technique whereby light invisible to the naked eye is used to accurately measure the distance and shape of objects. In the wake of several tests, there is reason to believe that lidar technology will become a key component in a range of sensors destined for autonomous vehicles.
- Artificial intelligence (IA) allows machines or on-board software to formalize human behaviour, such as perception, reasoning, analysis, decision-making, and action. In the autonomous vehicle field, AI is used to sort and analyze information that on-board computers receive from sensors, before deciding on the steps to take (e.g., accelerate, turn left, stop to avoid an obstacle, etc.).
AUTONOMOUS VEHICLES: NON-NEGLIGIBLE ADVANTAGES
The mass adoption of autonomous vehicles will have enormous social and economic advantages, with huge implications for the car industry, manufacturing, transportation, logistics, insurance, urban infrastructure and even health.
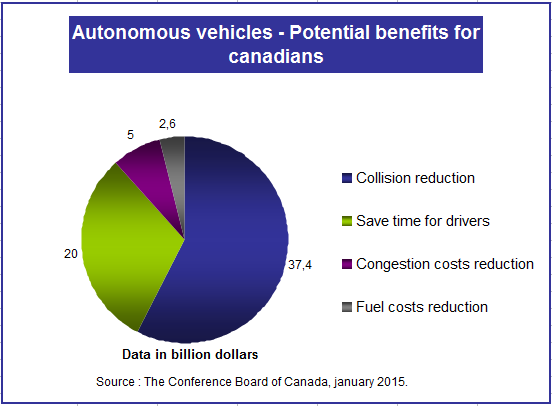
According to a 2015 report published by the Conference Board du Canada, the advent of automated vehicles has the potential to generate $65 billion in savings for Canadians, stemming from fewer traffic jams, less time wasted behind the wheel, and lower gas and collision costs. This report highlights the many advantages associated with these types of vehicles:
- Safety: The absence of driver intervention could eliminate most collisions caused by human error;
- Reduced need for parking: Autonomous vehicles could help reduce the number of vehicles purchased and thus facilitate the transition to free parking;
- Transportation accessibility: Autonomous vehicles are a more accessible means of transportation for people with a mobility impairment;
- Greener municipalities: Certain parking spaces would be transformed into green spaces; automated vehicles offer lower gas consumption than traditional vehicles, thanks to route optimization, connected vehicle technologies, and more gradual acceleration and braking;
- Synergies with electric vehicles: Thanks to the future miniaturization of batteries and rapid charging, electric vehicles could be used as autonomous taxis for urban transit;
- Custom public transit at an affordable cost: Autonomous vehicles could promote the use of new services (e.g., autonomous taxis) and thus reduce the need for certain public transit projects;
- Transportation as a service: Car-sharing companies could launch new services.
A FAST-GROWING GLOBAL MARKET
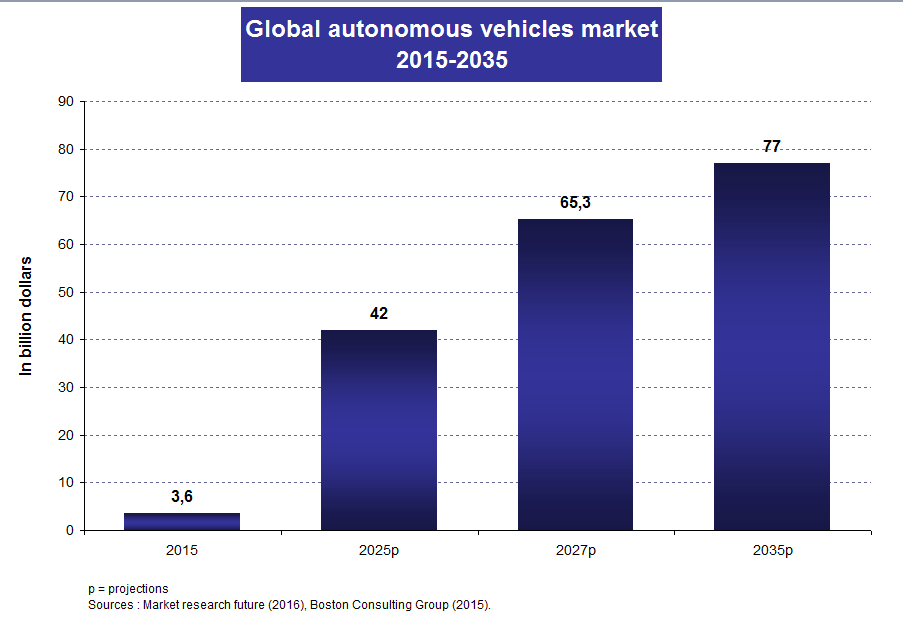
The market for autonomous vehicles is expected to grow exponentially in years to come, to reach $42 billion by 2025, which represents an annual growth rate of 28% over ten years. Over a longer time horizon, from 2015 to 2035, the autonomous car market is projected to grow at an annual rate of 16.5%.
According to a study conducted by the firm A.T. Kearney, taking into account impacts on other sectors (development of mobile applications, mobility services, special equipment such as guidance and communication systems, etc.), this market could be valued at $560 billion by 2035.
LEADING-EDGE RESEARCH AND DEVELOPMENT THRIVING IN MONTRÉAL
The democratization of autonomous vehicles depends largely on technological progress. Montréal researchers and companies are actively working to make their city a world leader in this emerging sector. Be it for new-generation wireless sensors, precision control algorithms or even new applications for tomorrow’s insurance sector, technological innovations continue to gain traction in Montréal.
René Jr. Landry | Laboratory of Space Technologies, Embedded Systems, Navigation and Avionics (LASSENA)

Professor René Jr. Landry of the École de technologie supérieure (ÉTS) de Montréal heads up the LASSENA lab, which is conducting research in various fields with multiple applications, including in transportation, and more specifically autonomous and connected vehicles. His research on these vehicles of the future covers the development of smart on-board systems, mobile devices for robust navigation and precise localization, as well as reliable and secure wireless communications. The standards and certifications associated with these new forms of mobility, particularly vehicle insurance, also constitute a priority research area for the LASSENA team. The synergy and complementarity between autonomous road transportation and international civil aviation – avionics in particular – is striking.
When it comes to safe wireless inter-vehicle communication, ultra-integrated devices named Micro-iBBs and Nano-iBBs constitute research platforms, as they are already equipped, in some cases, with Bluetooth, WiFi and LTE modules. Thus, their research themes revolve around improving quality of service (QOS), the security of communication protocols between two or more vehicles (V2V) and between vehicles and infrastructure (V2I), and the development of applications for the Internet of Things for car navigation purposes. Communication between vehicles and the environment (i.e., urban infrastructure and roads) is also of core area of interest in autonomous vehicle research.
Technologies developed to achieve precise navigation and autonomous guidance include robust and accurate attitude determination systems, advanced localization algorithms, map calibration systems such as Google Maps, as well as fleet tracking and accident diagnostics systems. Widely used in avionics, these algorithms are designed by merging data from autonomous sensors, such as radar or lidar cameras, with various emerging technologies, including MEMS sensors (accelerometers, gyrometers and magnetometers), RFID chips, and high-sensitivity GNSS receivers. These technologies allow autonomous vehicles to determine location, reconstruct their environment in real time, and detect objects in movement with a high degree of precision. In addition, they can be used to safely optimize vehicle fleet tracking through the use of international aviation standards, particularly for complex use scenarios such as automated parcel delivery, autonomous tracking of taxi fleets in a downtown core or autonomous heavy-duty trucks operating across a significant territory.
To identify the best possible landmarks-based localization in urban scenarios, Professor Landry and his team are conducting research aimed at developing advanced algorithms that can be used to provide effective solutions, even in so-called hostile environments, such as tunnels and urban canyons, or in less than optimal weather conditions (i.e., fog, ice, heavy snowfall, forests, roads with no signs, etc.). Still for purposes of high-precision navigation, the research underway is also intended to design autonomous guidance commands that can be applied to land or air vehicles (i.e., drones, unmanned aerial vehicles or UAV).
The LASSENA lab also studies non-technological issues or concerns raised by these future vehicles (i.e., standards, regulations) as part of its research, to account for the vehicle owner’s role in cases of autonomous vehicle sharing, and accidents or incidents, however minor. Drawing on data from black boxes, its researchers are developing new measurement methods and innovative metrics for real-time and/or post-processing analyses of the driving behaviour of these future vehicles. The resulting research findings will make it possible, for example, to determine new insurance premiums for these cars of the future based on “Pay as You Drive (PAYD),” “Pay How You Drive (PHYD)” or “Pay Where You Drive (PWYD).”
Youmin Zhang | Networked Autonomous Vehicles (NAV) Lab
The team led by Professor Youmin Zhang at NAV Lab of Concordia University, has developed various advanced technologies towards autonomous vehicles (including unmanned aerial vehicles (UAVs), autonomous cars (ACs), unmanned ground vehicles (UGVs), unmanned surface vehicles (USVs), as well as unmanned underwater vehicles (UUVs)). These technologies range from low-level fault-tolerant control strategies to high-level on-line guidance and navigation with sense and avoid (S&A) capabilities in order to make autonomous vehicles safer, more reliable and intelligent with higher level of autonomy. The main focus is to design and develop comprehensive frameworks which integrate on-line/onboard fault detection and diagnosis (FDD), fault-tolerant control (FTC), and guidance and navigation systems.
More specifically, the FDD system is designed to monitor the health status of actuators, sensors, and batteries of the vehicles. Such a system can give an alarm to the operator to do the maintenance of the vehicle or real-time reconfigurable/fault-tolerant guidance, navigation and control (GNC) for continuing the operation of autonomous vehicles, and it can also prognose the remaining useful life of any damaged part. Although FDD is a very important process but it is not sufficient to ensure the safe operation of the autonomous vehicles. For autonomous vehicles (on the air, space, land and water), the continuity of operation is a key feature and the vehicles should be capable of maintaining its pre-specified performance in terms of stability, quality, and mission accomplishment with safety despite the presence of damaged parts. This highlights the need for FTC system which acts as a low-level control system in the autonomous vehicles. It can accommodate system/component malfunctions and also maintain the system stability and performance to continue its safe operation. During operations, if any actuator/sensor is broken or damaged, the FTC system reconfigures the low-level control strategy to enable the vehicles continuing to work.
Moreover, the autonomous vehicles work in a complex environment where collision may occur if the autonomous vehicle is not well-aware about its surrounding. Therefore, sense and avoid is an essential subsystem for any autonomous vehicles on the air, space, land, or water. Different obstacle avoidance conditions are studied and tested in the NAV Lab. The on-line guidance and navigation strategies can make both global and local path planning for autonomous vehicles in two-dimensional (2D; for UGVs/ACs and USVs) or three-dimensional (3D; for UAVs and satellites) motion. Based on the information from sensing technologies and FDD schemes, the guidance and navigation subsystems can make real-time path/trajectory generation, and path/trajectory planning or re-planning for vehicles to avoid collisions and compensate to the failures/damages, with the help of FTC techniques. With the developed on-line (fault-tolerant) guidance, navigation and control system, when obstacles are detected, the vehicle can re-plan the path to avoid collision and to accomplish its assigned mission. Furthermore, multiple autonomous vehicles can be employed to accomplish a mission cooperatively. During the mission, when one or more vehicles encounter faults, the remaining healthy vehicles should re-plan their path to avoid collisions with the damaged vehicles, and meanwhile the damaged vehicles can find a safe way to return to home with accepted level of performance.
Professor Zhang’s team, in collaboration with several local industrial organizations such as Montreal-based companies Marinvent Corporation, Opal-RT Technologies Inc., Pegasus Research and Technologies, and other Canadian companies has developed and experimentally verified different FDD, FTC, and S&A technologies that make single autonomous vehicle (including UAVs, UGVs/ACs, USVs and satellites) safe by incorporating with FDD and FTC techniques, and furthermore the latest and emerging technologies on fault-tolerant cooperative control (FTCC) which allow multiple vehicles work in a cooperative manner for applications such as forest fire, powerline monitoring and detection in the presence of faults/damages on the autonomous vehicle. The developed technologies by Professor Zhang’s group at not only can be applied to autonomous vehicles, but also can be applied to any other safety-critical systems such as wind turbines/wind farm as well as smart power grids, improving their reliability and availability. This emerging area of research on renewable sources of energy and smart grids has also been studied and investigated by Zhang’s group at Concordia University. Professor Zhang is also a member of the Concordia Institute of Aerospace Design and Innovation (CIADI) and heads the Diagnostic, Flight Control and Simulation Laboratory (DFCS).
Ke Wu | Advanced Research Centre in Microwaves and Space Electronics (POLY-GRAMES)
Professor Ke Wu, director of Polytechnique Montréal’s POLY-GRAMES Research Centre, is developing next-generation wireless technologies, including smart connectivity. According to the researcher, current communication systems present three main obstacles to the deployment of autonomous vehicles: limited data transmission speed, limited mobility due to wave frequency offset, and very long response time. In order to overcome these limitations, Professor Wu has studied and demonstrated the contribution of future wireless systems that would transmit data at ultra-high speeds and provide high-resolution, highly precise detection capacity (i.e., sensors, imaging, identification through walls and fog, etc.). His current research is aimed specifically at developing multifunctional wireless receiver/transmitter technologies and integrated technology platforms.

Wireless communications, sensors, and energy transmission play an integral part in the development of multifunctional wireless receiver/transmitter technologies meant to meet various performance needs in a range of emerging applications. Thanks to their capacity to transmit signals over a wide area network (WAN), for example, next-generation wireless sensors will allow connected and autonomous vehicles to capture and share information in real time, including on distance, speed, temperature and humidity.
Integrated technological platforms are used in the study and deployment of manufacturing techniques designed to create low-cost, compact and high-performance wireless circuits and systems, which are critical to future massive applications, such as the Internet of Things and global positioning systems (GPS). The latter, in particular, allow autonomous vehicles to identify and accurately locate objects (i.e., cars, bicycles, strollers, etc.) and people at various locations in the nearby environment.
According to the researcher, these next-generation wireless technologies present four main advantages or parametric targets:
- Increased spectral efficiency favouring rapid data transmission with higher flow;
- High energy efficiency;
- High spatial efficiency;
- High decision-making efficiency.
Several emerging sectors stand to benefit from the power of these technologies, among them the connected and autonomous vehicle industries, the smart city, the manufacturing sector (automated production), security, artificial intelligence, virtual reality, telemedicine, and even clean energy.
To date, Professor Wu’s research has resulted in about 40 patents being obtained in the wireless technology, radiofrequency and microwave fields, and in more than 1,100 scientific publications. In 2016 Mr. Wu was named the recipient of the first NSERC/Huawei Technologies Industrial Research Chair in Future Wireless Technologies at the POLY-GRAMES Research Centre.
Maarouf Saad | Power Electronics and Industrial Control Research Group (GRÉPCI)
ÉTS Professor Maarouf Saad and his team are conducting research intended to develop robotics applications, including mobile robots, notably through the use of mechatronics (i.e., synergy between mechanics, electronics and informatics). More specifically, they are developing the material infrastructure for robots, trajectory generation algorithms, and electronic circuits. First, the material infrastructure of autonomous robots includes all the sensory components, notably the cameras or vision systems, remote sensing by laser (lidar), distance sensors (sonars), position (encoder) and even the geolocation systems (GPS). The algorithms developed include the control function making it possible to autonomously track vehicles from a point of departure to a point of arrival or self parking of the robot. These algorithms take into account aspects such as the avoidance of stationary (e.g., fire hydrants, cars, etc.) or dynamic objects (e.g., moving objects or persons). Using the algorithms developed, the robot maps its environment to determine the best trajectory to follow (safety consideration). Finally, the on-board systems (software) designed ensure the intelligent management of autonomous vehicles and indicate the right decision to take (i.e., turn, stop, continue, etc.). Thanks to these systems, robot would thus be capable of interpreting external signals (i.e., flow of traffic, road conditions, etc.) and taking into account the decisions made via the algorithm.
Professor Saad’s research is carried out as part of GRÉPCI, a research group with expertise across a range of fields, including robotics, power electronics, and renewable energy.
Jérôme Le Ny | Mobile Robotics and Autonomous Systems Laboratory
Professor Jérôme Le Ny, current director of Polytechnique Montréal’s Mobile Robotics and Autonomous Systems Laboratory, is developing algorithms aimed at making autonomous systems (land-based or aerial) even more autonomous. His team has focused on a set of problems posed by the development of these systems, which are designed to perceive their environment in real time, plan their decisions, and – increasingly – collaborate with other systems. Current robots often require the presence of a pilot, and they function in well defined and controlled environments. Professor Le Ny’s research, by contrast, is aimed at developing decision-making algorithms capable of functioning in the presence of significant uncertainty, for example in places about which little is known, while remaining safe. In order to achieve this, the researcher combines a data set from various sensors, notably cameras and/or lidars, in order to reconstruct a 3D model of the space around the robot, thereby allowing it to plan its actions in its environment. His recent research includes an effort to develop algorithms for performing automated inspections of large structures, such as buildings or wind turbines, or site monitoring by drones. Professor Le Ny’s students, working in collaboration with those of his colleague, Professor David Saussié, recently succeeded in automatically landing a drone on a car driving at more than 50 km/h. This successful test could have implications for parcel delivery. This Montréal-based expertise has been put to good advantage in partnerships with companies developing drones, and with the Institut de recherche d’Hydro-Québec, in connection with inspection projects.
While Professor Le Ny’s research does not relate directly to autonomous vehicles, the tools he is developing could prove useful in that field. According to the researcher, however, the decision-making algorithms are developed for a specific application and a certain level of complexity in the environment. Thus, an autonomous car circulating in a downtown area in inclement weather faces more demanding constraints than a robot inspecting a building on a work site with regulated access. The level of autonomy and safety of autonomous cars could represent an area of interest for future research, however.
SMEs DOING THEIR PART TO PROMOTE AUTONOMOUS VEHICLES
In this era of international competition for smart mobility driven by technological innovation, cities count on the know-how of small- and medium-sized enterprises (SME). In the autonomous vehicle sector, Montréal- and Québec-based SMEs deserve mention for carving out an impressive niche.
LeddarTech| Experts in LiDAR Technology for Autonomous Driving Applications
The capacity to perceive the surrounding environment and exhaustively digitize all fixed objects or objects in movement is a fundamental issue for autonomous driving. LeddarTech is a recognized Québec leader in LiDAR detection technology and telemetry used to detect, locate and measure the distance between one vehicle and objects and/or persons in a given field of vision. The company – created 10 years ago as a spinoff of the National Optics Institute (NOI) – boasts an impressive intellectual property offering, with 52 patents submitted to date.

LeddarTech is the developer and owner of Leddar, an innovative Lidar detection technology composed of a set of software applications and processing algorithms that digitize the light signal from a sensor, thereby improving its performance, reducing production costs, and providing effective use even under extreme environmental conditions. Leddar comes in the form of detection modules ready for use in specialized applications, such as transportation management, security, drones and industrial production, and in the form of integrated circuits meant to meet the demands from sectors, like the car industry, that require high volume and optimized costs. LeddarTech is leading the way in this lucrative growth market, where the majority of manufacturers are anxious to integrate Lidar solutions. In January 2017, the company presented new sensor configurations at CES, showcasing its future “solid-state” 2D and 3D Lidar. Offering dot matrices of up to 512 x 64, these sensors, which support assisted and autonomous driving applications, will be built using LeddarCore next-generation integrated circuits.
LeddarTech’s initial breakthrough in the automotive sector came in 2014, with an agreement to licence Leddar algorithms reached with Valéo, a motor vehicle equipment manufacturer. The agreement allowed LeddarTech to show that its technology could be adapted to manufacture sensors for this key market. Today, LeddarTech is well on its way to establishing a Leddar ecosystem serving the automobile industry, by allowing accredited suppliers of microprocessors (Texas Instruments and Renesas) and optical components (Osram, Hamamatsu, Excelitas) to produce Leddar sensors. The company is also in discussions with several major auto parts manufacturers and hopes to announce the launch of joint development projects over the course of 2017. In February 2017, LeddarTech confirmed an agreement with the German firm IDT, which will be in charge of producing LCA2 integrated circuits, while a partner for the LCA3 generation should be announced in the near future.
Pegasus Research & Technologies
Pegasus Research & Technologies, a company specialized in simulation, artificial intelligence, robotics and autonomous systems, provides research and engineering services to companies in the aerospace and defence sector. For the past two years, the Montréal-based company has been developing a mission control module (Intelligent Mission Controller or IMC) for use in drones and land robots.
The IMC ensures total mission safety thanks to an on-board health monitoring system (Embedded Health Monitoring System or eHMS) that tracks battery, motor and navigation sensor readings in order to prevent failures and equipment loss and avoid collisions. At the same time, the IMC uses on-board processing to execute complex tasks, such as image collection and validation, 3D reconstruction and recognition, object analysis, and building inspection. Pegasus has also developed a smart drone prototype equipped with an infrared sensor, which allows it to offer a highly-automated capacity for search and rescue missions. In addition, Pegasus is collaborating on computer vision projects with the Centre de recherche informatique de Montréal (CRIM), where it has offices.

Montréal-based OPAL-RT Technologies designs tools for developing and testing control systems in the electric and electronic sectors. The company supplies accessible and leading-edge real-time simulation technologies to engineers and researchers with the objective of accelerating the development of higher performance products, based on more reliable energy transmission. Since 1997, several industries in the automobile, aerospace and energy sectors have turned to OPAL-RT, transforming the company into a world leader in real-time simulation and test equipment for electromechanical and power electronics systems. Today, OPAL-RT plays an active role in the simulation, validation and certification of autonomous vehicles. Thanks to its expertise, automakers can test all automated driving scenarios before the actual road tests are carried out. The company is developing integrated platforms with several types of simulation models, including municipal infrastructure, traffic, pedestrians and cyclists, or models for cameras, radars and automatic control systems (artificial intelligence). These platforms allow automakers to simulate over several million kilometres before using the roads.
The arrival of autonomous vehicles presents a unique opportunity for Montréal to promote the city’s health and make it greener, smarter and more accessible. Local research and development initiatives and innovative SMEs continue to make a vital contribution. While not an exhaustive picture of current developments in this sector, the technologies presented above speak to the know-how and creativity of Montréal-based actors in this emerging industry. What’s more, these fast-growing technologies give Montréal a golden opportunity to draw on know-how from other regions in Québec.
That said, autonomous vehicle development still faces certain challenges, which must be overcome in order to ensure the large-scale deployment of these vehicles. These include regulations, privacy protection, automobile insurance, urban planning, and the development of public infrastructures—all of which represent leading concerns for Montréal decision-makers.
Montréal recently launched its Institut de l’électrification et des transports intelligents. Integrating innovations in sustainable mobility into municipal regulations will constitute a central challenge for this new institute. As well, the city intends to establish a downtown experimentation zone where tests can be performed under real conditions. This announcement – which speaks to the city’s dedication to advancing new technologies – bodes well for the future of autonomous vehicles in Montréal.
PRINCIPAL REFERENCES
- Borden Ladner Gervais (2016). « Les autonomous vehicles : une véritable révolution ». http://blg.com/fr/Nouvelles-Et-Publications/Documents/Vehicules-autonomes.pdf
- The Conference Board du Canada (January 2015). “Automated Vehicles. The Coming of the Next Disruptive Technology.” http://www.cavcoe.com/articles/AV_rpt_2015-01.pdf


